

Menschen können alltägliche Bewegungen wie das Greifen eines Trinkglases scheinbar mühelos ausführen. Wenn diese Fähigkeit aufgrund von Krankheiten oder Alter beeinträchtigt wird, können Assistenzsystemen im Alltag unterstützen. Solche Systeme müssen präzise vorhersagen können, welche Bewegung ausgeführt werden soll, um diese optimal in Echtzeit zu unterstützen. Diese Vorhersage stellt eine der größten Herausforderungen in der Rehabilitationsrobotik und in der Mensch-Roboter-Interaktion dar.
Die Forschungsgruppe von Dr. Isabell Wochner untersucht, wie Alltagsbewegungen mithilfe tragbarer Sensordaten und neuromechanischer Computermodelle in Echtzeit vorhergesagt werden können. Dazu sollen am Körper tragbare Sensoren in Kombination mit KI-Methoden eingesetzt werden, um die Blickrichtung und Körperbewegung zu erfassen. Das Projekt zielt darauf ab, durch diese verbesserte Vorhersage robotische Assistenzsysteme zu ermöglichen, die Menschen mit motorischen Beeinträchtigungen in Echtzeit unterstützen und somit ihre Lebensqualität erheblich verbessern.
Selected Research Projects
Bio-inspired neuromechanical simulation for upper limb movements
Human motor control is governed by feedforward and feedback loops involving multiple brain regions, the spinal cord, and muscle-related efferent and afferent connections. The muscle activations that arise from this structure result in physiological and pathophysiological movement patterns.
In reinforcement learning, artificial neural networks are trained to produce human-like movements that can be indistinguishable from their natural counterparts. However, their internal structure and reliance on continuous-valued signal processing differ fundamentally from the human sensorimotor system, which limits their interpretability for disease modelling.
Spiking neural networks more closely resemble biological neural systems. Like the human brain, spiking neurons communicate via discrete spikes rather than continuous signals.The use of spiking neurons in bio-inspired controllers driving neuromusculoskeletal models therefore promises improved explainability and interpretability of a model’s internal processes when modelling movement patterns associated with neural motor disorders such as Parkinson’s disease or spinocerebellar ataxia.
This project investigates how computational models of neural structures can be leveraged to create a neuromechanical control paradigm that reproduces human movement, promotes mechanistic understanding of how individual neural structures contribute to normal motor control, and how dysfunctional structures or interactions give rise to motor disorders.
Related Publications:
Chacon, P. F. S., Wochner, I., Hammer, M., Eppler, J. M., Kunkel, S., & Schmitt, S. (2025). Closed-loop coupling of both physiological spindle model and spinal pathways for sensorimotor control of human center-out reaching. Frontiers in Computational Neuroscience, 19, 1575630.
Wochner, I., Driess, D., Zimmermann, H., Haeufle, D. F., Toussaint, M., & Schmitt, S. (2020). Optimality principles in human point-to-manifold reaching accounting for muscle dynamics. Frontiers in computational neuroscience, 14, 38.
Charaja, J. P., Wochner, I., Schumacher, P., Ilg, W., Giese, M., Maufroy, C., ... & Haeufle, D. F. (2024, September). Generating Realistic Arm Movements in Reinforcement Learning: A Quantitative Comparison of Reward Terms and Task Requirements. In 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob) (pp. 562-568). IEEE.
ProPero: From Prosthesis to proprioceptive Perception
Proprioception—the sense of body position, movement, and force—is essential for accurate and efficient motor control. Its loss, as in diabetes, viral infections, or limb amputation, leads to impaired movement, chronic pain, and altered body awareness. Despite its importance, restoring proprioception remains a major challenge, in part because its cortical representation lacks a clear spatial organization.
In this project, we focus on neuromechanical modeling as a foundation for restoring proprioceptive feedback through cortical stimulation. We develop real-time biomechanical models of the forelimb to predict musculoskeletal dynamics and the associated proprioceptive signals. These model-based signals are transformed using machine-learning methods into stimulation patterns and integrated with a motorized upper-limb prosthetic system. By assessing how this artificial feedback influences motor behavior, the project aims to identify principles for effective proprioceptive restoration and to inform the design of future neuroprosthetic systems.
Related Publications:
Wochner, I., Picard, C., Estebanez, L., & Haeufle, D. F. (2024, November). Predictive Modeling of 3D Forelimb Reaching Movements in Mice for Enhanced Closed-Loop Neural Prostheses. In International Conference on NeuroRehabilitation (pp. 709-713). Cham: Springer Nature Switzerland.
Chacon, P. F., Hammer, M., Wochner, I., Walter, J. R., & Schmitt, S. (2025). A physiologically enhanced muscle spindle model: using a Hill-type model for extrafusal fibers as template for intrafusal fibers. Computer Methods in Biomechanics and Biomedical Engineering, 28(4), 430-449.
Wochner, I., Driess, D., Zimmermann, H., Haeufle, D. F., Toussaint, M., & Schmitt, S. (2020). Optimality principles in human point-to-manifold reaching accounting for muscle dynamics. Frontiers in computational neuroscience, 14, 38.
Scene Understanding and Intention Prediction for Upper-Limb Exoskeleton Assistance in Activities of Daily Living for Patients with Neurodegenerative Diseases
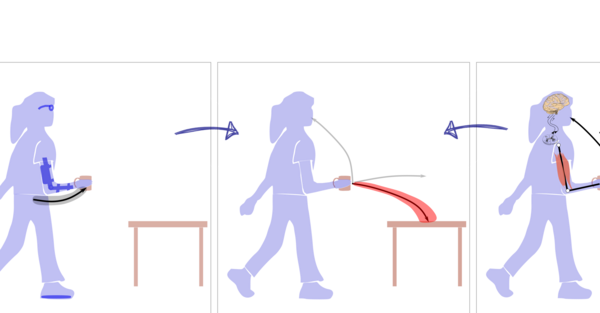
Neurodegenerative diseases such as Parkinson’s disease or cerebellar ataxia can severely impair a person’s ability to perform activities of daily living, including eating or drinking. Assistive upper-limb exoskeletons that suppress pathological movement components offer a promising way to support patients in maintaining independence. Developing such systems requires computationally efficient and robust methods to perceive the surrounding environment and to infer the user’s intended movement.
In this project, we combine motion information from inertial measurement units with visual data from cameras and eye-tracking to estimate both the external scene and the user’s actions. Lightweight biomechanical constraints, such as gaze–hand coordination, reachability, and motion smoothness, are incorporated to support reliable intention-aware assistance. The work addresses key challenges including indoor scene understanding, depth estimation, object-of-interest detection, human intention prediction during everyday tasks, and upper-body pose estimation. Particular attention is given to the constraints of neurodegenerative disease, such as limited data availability and disease-specific physical impairments, with the goal of enabling practical and effective assistive exoskeleton control in real-world daily activities.
Related Publications:
Ilg, W., Wochner, I., Charaja, J. P., Hofmann, V., Strenge, O., Adam, M., ... & Haeufle, D. (2025, May). iAssistADL: Intelligent Assistive Device for Patients with Neurodegenerative Movement Disorder: Concepts and First Implementations. In 2025 International Conference On Rehabilitation Robotics (ICORR) (pp. 443-449). IEEE.

+49 (0)7071-
29-88800

+49 (0)7071-
29-89156
+49 (0)7071-
29-88830

+49 (0)7071-
29-88800

+49 (0)7071-
29-88800
Selected publications
Wochner, I., Schumacher, P., Martius, G., Büchler, D., Schmitt, S., Haeufle, D.F.B. (2022). Learning with Muscles: Benefits for Data-Efficiency and Robustness in Anthropomorphic Tasks. CoRL 2022, https://openreview.net/forum?id=Xo3eOibXCQ8
Waldhof, M., Wochner, I., Stollenmaier, K., Parspour, N., & Schmitt, S. (2022). Design and Scaling of Exoskeleton Power Units Considering Load Cycles of Humans. Robotics, 11(5), 107. https://doi.org/10.3390/robotics11050107
Wochner, I., Nölle, L. V., Martynenko, O. V., & Schmitt, S. (2022). ‘Falling heads’: Investigating reflexive Responses to Head–neck Perturbations. Biomedical engineering online, 21(1), 1-23. https://doi.org/10.1186/s12938-022-00994-9
Martynenko, O. V., Wochner, I., Nölle, L. V., Alfaro, E. H., Schmitt, S.,.. & Vlachoutsis, S. (2021). Comparison of the Head-Neck Kinematics of Different Active Human Body Models with Experimental Data. IRCOBI Conference Proceedings, 51, 20-7. http://www.ircobi.org/wordpress/downloads/irc21/pdf-files/2121.pdf
Haeufle, D. F.B., Wochner, I., Holzmüller, D., Driess, D., Günther, M., & Schmitt, S. (2020). Muscles reduce neuronal Information load: Quantification of Control Effort in biological vs. robotic Pointing and Walking. Frontiers in Robotics and AI, 7, 77. https://doi.org/10.3389/frobt.2020.00077
Wochner, I., Driess, D., Zimmermann, H., Haeufle, D. F., Toussaint, M., & Schmitt, S. (2020). Optimality principles in human point-to-manifold reaching accounting for muscle dynamics. Frontiers in computational neuroscience, 14, 38. https://doi.org/10.3389/fncom.2020.00038
Chacon, P.F.S., Hammer, M., Wochner, I., Walter, J.R. & Schmitt, S. (2023). A physiologically enhanced muscle spindle model: using a Hill-type model for extrafusal fibers as template for intrafusal fibers. Computer Methods in Biomechanics and Biomedical Engineering (2023): 1-20. doi.org/10.1080/10255842.2023.2293652
Wochner, I., Nadler, T., Stollenmaier, K., Pley, C., Ilg, W., Wolfen, S., Schmitt, S., Haeufle, D.F.B. (2024) “ATARO: a muscle-driven biorobotic arm to investigate healthy and impaired motor control”, IEEE BioRob 2024, https://doi.org/10.1109/BioRob60516.2024.10719710
Sapounaki, M., Schumacher, P., Ilg, W., Giese, M., Maufroy, C., Bulling, A., Schmitt, S., Haeufle, Daniel F.B., Wochner, I., (2024): “Quantifying human upper limb stiffness responses based on a computationally efficient neuromusculoskeletal arm model”, IEEE BioRob 2024 https://doi.org/10.1109/BioRob60516.2024.10719776
Charaja, J., Wochner, I., Schumacher, P., Ilg, W., Giese, M., Maufroy, C., Bulling, A., Schmitt, S., and Haeufle, D.F.B (2024) “Generating realistic arm movements in reinforcement learning: A quantitative comparison of reward terms and task requirements,” IEEE BioRob 2024 doi.org/0.1109/BioRob60516.2024.10719719
Nölle, L. V., Wochner, I., Hammer, M., & Schmitt, S. "Using muscle-tendon load limits to assess unphysiological musculoskeletal model deformation and Hill-type muscle parameter choice." PLOS ONE (2024): 2024-04. https://doi.org/10.1371/journal.pone.0302949
Join us as a Researcher!
We have different opportunities for bachelor and master students, feel free to reach out.
We also have various PhD and PostDoc opportunities.
For different possibilities, please contact us directly.
Hertie-Zentrum für Neurologie
Hertie-Institut für klinische Hirnforschung
Ebene 5, Raum 518
Otfried-Müller-Str. 25
72076 Tübingen
Tel.: + 49 (0)7071 29-88800




